作者:科技政策中心 現職:科技政策中心
文章來源:經濟日報 94/08/19 工商時報 94/08/19
發佈時間:94.08.26
行 政院二○○五年產業科技策略會議圓滿閉幕,在科技顧問等專家及產官界代表的討論下,預算投入至少16億元經費,推動研發包括軟性電子1億元、智慧型車輛 5億元、智慧化生活空間3億元、RFID 2億元、科技化服務業旗鑑計畫5億元等六項重點發展方向。其中奈米科技部分,已有奈米國家型計畫執行中,從2003年起六年內投入200億元。今年最大的 不同是,所有議題都與生活習習相關,行政院長謝長廷指示公部門應率先示範採用SRB定調的六大新興科技,以帶動民間投入意願。
Tuesday, August 30, 2005
老人輔具研發 一年補助兩億
老人輔具研發 一年補助兩億
作者:科技政策中心 現職:科技政策中心
文章來源:自由時報 94/08/19
發佈時間:94.08.26
國科會宣布將以一年兩億元的規模,補助學界進行「前瞻優質生活環境科技」的跨領域研發計畫,鼓勵科技和人文學者組成團隊並結合產業界,以研發出十五年後老齡化台灣所需的科技產品。因老齡化是科技社會普遍趨勢,老人照護和輔具的市場是被看好的明星產業之一,以期打造台灣優質生活環境。
作者:科技政策中心 現職:科技政策中心
文章來源:自由時報 94/08/19
發佈時間:94.08.26
國科會宣布將以一年兩億元的規模,補助學界進行「前瞻優質生活環境科技」的跨領域研發計畫,鼓勵科技和人文學者組成團隊並結合產業界,以研發出十五年後老齡化台灣所需的科技產品。因老齡化是科技社會普遍趨勢,老人照護和輔具的市場是被看好的明星產業之一,以期打造台灣優質生活環境。
Friday, August 26, 2005
Free tickets for 《亞太創新‧創業論壇》
Hi Folks,
If you are interested in this event, let me know as soon as possible! It is free for three of my students!
-Bob
------------------------------------
王教授,您好:
今日由廣達得知王教授將參與9月1日《亞太創新‧創業論壇》.時代基金會促成本會議,期待更多的學術及學研交流,因此特別提供三個免費的學生名額給您的研究生,煩請他們填寫完成附加檔案中之報名資料,於8月28日前傳真至時代基金會給李小姐.機會非常難得,請王教授邀請學生一同與會.
聯絡方式 傳真:2545-3523 電話:2545-3525 李小姐
時代基金會 敬啟
----------------
時間:九月一日(週四) 9:00 ~ 17:00
地點:台北君悅大飯店三樓宴會廳
詳見 http://www.businessweekly.com.tw/event/2005apiec/index.php
一場世界級大師的智慧論壇, 10堂科技成果及商業應用分享,
結合人類福祉與無限商機, 由來自全球科技智慧搖籃-麻省理工MIT CSAIL實驗室
三位世界級大師及七家全球科技標竿企業,
分享最新「殺手級」技術突破,亞洲首度發表!
If you are interested in this event, let me know as soon as possible! It is free for three of my students!
-Bob
------------------------------------
王教授,您好:
今日由廣達得知王教授將參與9月1日《亞太創新‧創業論壇》.時代基金會促成本會議,期待更多的學術及學研交流,因此特別提供三個免費的學生名額給您的研究生,煩請他們填寫完成附加檔案中之報名資料,於8月28日前傳真至時代基金會給李小姐.機會非常難得,請王教授邀請學生一同與會.
聯絡方式 傳真:2545-3523 電話:2545-3525 李小姐
時代基金會 敬啟
----------------
時間:九月一日(週四) 9:00 ~ 17:00
地點:台北君悅大飯店三樓宴會廳
詳見 http://www.businessweekly.com.tw/event/2005apiec/index.php
一場世界級大師的智慧論壇, 10堂科技成果及商業應用分享,
結合人類福祉與無限商機, 由來自全球科技智慧搖籃-麻省理工MIT CSAIL實驗室
三位世界級大師及七家全球科技標竿企業,
分享最新「殺手級」技術突破,亞洲首度發表!
CMU VASC Talk: Towards Intelligent Video Solutions
Xiaoming Liu, Jens Rittscher, Nils Krahnstoever
Visualization and Computer Vision
GE Global Research
ABSTRACT
The Visualization and Computer Vision Group at GE Global Research serves a large number of GE businesses in areas such as medical image processing, industrial inspection, and intelligent video systems. We will give a brief overview of our group and will then focus on security related projects. We will motivate specific research needs that originate from our collaboration with GE Security. The objective of the ongoing research is to extend the functionality and robustness of the intelligent video product line currently offered by GE.
The technical presentation will include auto-calibration, segmentation of crowds, and people counting. The talk will present an approach to reliably estimate camera parameters form person detections. Furthermore we will illustrate that this calibration information effectively enables model-based segmentation of crowds and people counting.
Visualization and Computer Vision
GE Global Research
ABSTRACT
The Visualization and Computer Vision Group at GE Global Research serves a large number of GE businesses in areas such as medical image processing, industrial inspection, and intelligent video systems. We will give a brief overview of our group and will then focus on security related projects. We will motivate specific research needs that originate from our collaboration with GE Security. The objective of the ongoing research is to extend the functionality and robustness of the intelligent video product line currently offered by GE.
The technical presentation will include auto-calibration, segmentation of crowds, and people counting. The talk will present an approach to reliably estimate camera parameters form person detections. Furthermore we will illustrate that this calibration information effectively enables model-based segmentation of crowds and people counting.
Thursday, August 25, 2005
About the Group Meeting
I would like to arrange a day for the group meeting, say from Monday to Wednesday, temporarily. Here you can share what you are learning, what you are observing about a problem, how it affects you, or even offer a better solution. Don't worry about this since you will only become the speaker after you get ready.
Our adviser, Bob, will give us a guide to robotics at the first meeting. Feel free to tell me if you have any question about this meeting.
Please pick days which are good for you from below.
1) Mon, Aug 29
2) Tue, Aug 30
3) Wed, Aug 31
4) Mon, Nov 5
5) Tue, Nov 6
6) Wed, Nov 7
-any
Our adviser, Bob, will give us a guide to robotics at the first meeting. Feel free to tell me if you have any question about this meeting.
Please pick days which are good for you from below.
1) Mon, Aug 29
2) Tue, Aug 30
3) Wed, Aug 31
4) Mon, Nov 5
5) Tue, Nov 6
6) Wed, Nov 7
-any
Wednesday, August 24, 2005
Blueprint of Room 407
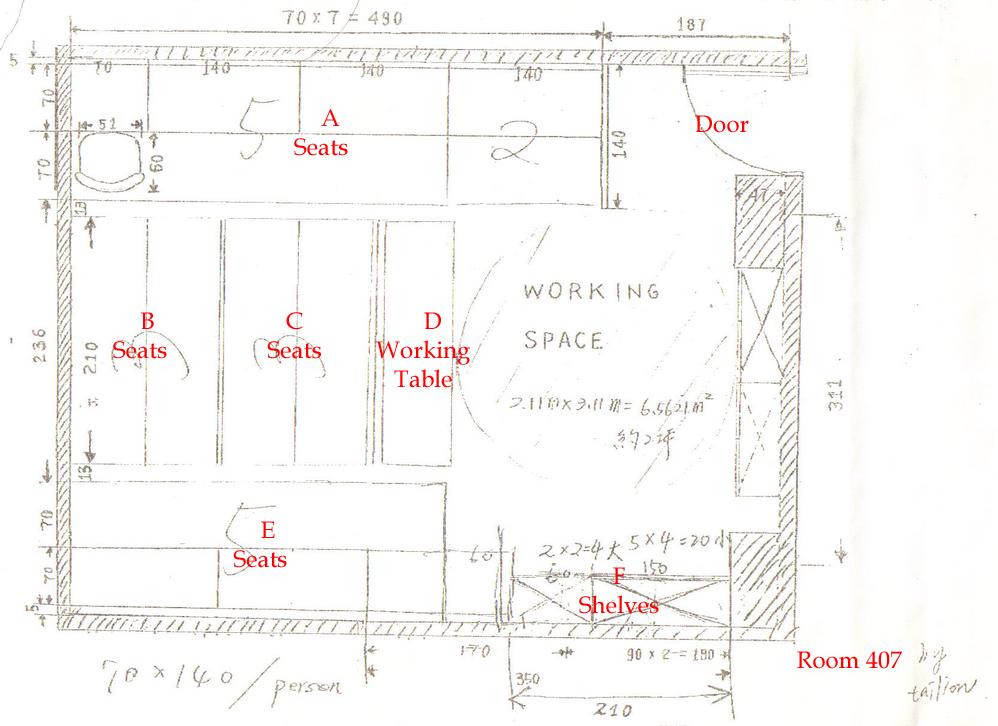
Thanks Tailion for working on this.
This is about the blueprint of our lab space. Please let me know if you have any question/suggestion and comment on this post.
-any
Learning Through Smart Wheelchairs
The report
From 1990 to 1994 CALL ran two projects to first develop the Smart Wheelchair, and then evaluate them. The main outcome of the evaluation (apart from the Smart Wheelchairs themselves) was a report and annexes. Although this report was originally published in 1994, it is as relevant now as it was then. It is still one of the only pieces of qualitative research into the evaluation of the effective use of Smart Wheelchairs as a part of children’s emerging mobility, communication, education and personal development.
The report focuses on the development of the chair and the tools used to evaluate its use. Twelve CALL Centre Smart Wheelchairs were introduced to three Edinburgh based special schools.
From 1990 to 1994 CALL ran two projects to first develop the Smart Wheelchair, and then evaluate them. The main outcome of the evaluation (apart from the Smart Wheelchairs themselves) was a report and annexes. Although this report was originally published in 1994, it is as relevant now as it was then. It is still one of the only pieces of qualitative research into the evaluation of the effective use of Smart Wheelchairs as a part of children’s emerging mobility, communication, education and personal development.
The report focuses on the development of the chair and the tools used to evaluate its use. Twelve CALL Centre Smart Wheelchairs were introduced to three Edinburgh based special schools.
Monday, August 22, 2005
Tutorial on Nonparametric Bayesian Methods
Zoubin Ghahramani
Bayesian methods provide a sound statistical framework for modelling and decision making. However, most simple parametric models are not realistic for modelling real-world data. Non-parametric models are much more flexible and therefore are much more likely to capture our beliefs about the data. They also often result in much better predictive performance. I will give a survey/tutorial of the field of non-parametric Bayesian statistics from the perspective of machine learning. Topics will include:
* The need for non-parametric models
* Gaussian processes and their application to classification, regression, and other prediction problems
* Chinese restaurant processes, different constructions, Pitman-Yor processes
* Dirichlet processes, Dirichlet process mixtures, Hierarchical Dirichlet processes and infinite HMMs
* Polya trees
* Dirichlet diffusion trees
* Time permitting, some new work on Indian buffet processes
The slides.
Bayesian methods provide a sound statistical framework for modelling and decision making. However, most simple parametric models are not realistic for modelling real-world data. Non-parametric models are much more flexible and therefore are much more likely to capture our beliefs about the data. They also often result in much better predictive performance. I will give a survey/tutorial of the field of non-parametric Bayesian statistics from the perspective of machine learning. Topics will include:
* The need for non-parametric models
* Gaussian processes and their application to classification, regression, and other prediction problems
* Chinese restaurant processes, different constructions, Pitman-Yor processes
* Dirichlet processes, Dirichlet process mixtures, Hierarchical Dirichlet processes and infinite HMMs
* Polya trees
* Dirichlet diffusion trees
* Time permitting, some new work on Indian buffet processes
The slides.
Saturday, August 20, 2005
MIT thesis defense: Feature-Based Pronunciation Modeling for Automatic Speech Recognition
Karen Livescu , Spoken Language Systems Group
Spoken language, especially conversational speech, is characterized by a great deal of variability in word pronunciation, including many variants that differ grossly from dictionary prototypes. This has been cited as a factor in the poor performance of automatic speech recognizers on conversational speech. One approach to handling this variation consists of expanding the dictionary with phonetic substitution, insertion, and deletion rules. This has the drawbacks that (1) many pronunciation variations typically remain unaccounted for, and (2) word confusability is increased due to the high granularity of phone units.
We present an alternative approach, in which many types of pronunciation variation are explained by representing speech as multiple streams of linguistic features rather than a single stream of phones. Features may correspond to the positions of the speech articulators, such as the lips and tongue, or to more abstract linguistic categories. By allowing for asynchrony between features and per-feature substitutions, many pronunciation changes that are difficult to account for with phone-based models become quite natural. Although it is well-known that many phenomena can be attributed to this ``semi-independent evolution'' of features, previous models of pronunciation variation have typically not taken advantage of this.
In particular, we propose a class of feature-based pronunciation models implemented using dynamic Bayesian networks (DBNs). The DBN approach allows us to naturally represent the factorization of the state space of feature combinations into factors corresponding to different features, as well as providing standard algorithms for inference and parameter learning. We investigate the behavior of such a model in isolation using manually transcribed speech data. These experiments suggest that when compared to a phone-based baseline, a feature-based model has both higher coverage of observed pronunciations and better recognition performance on isolated words excised from a conversational context. We also discuss the ways in which such a model can be incorporated into various types of end-to-end speech recognizers and present several examples of implemented systems, for both acoustic speech recognition and lipreading tasks.
Spoken language, especially conversational speech, is characterized by a great deal of variability in word pronunciation, including many variants that differ grossly from dictionary prototypes. This has been cited as a factor in the poor performance of automatic speech recognizers on conversational speech. One approach to handling this variation consists of expanding the dictionary with phonetic substitution, insertion, and deletion rules. This has the drawbacks that (1) many pronunciation variations typically remain unaccounted for, and (2) word confusability is increased due to the high granularity of phone units.
We present an alternative approach, in which many types of pronunciation variation are explained by representing speech as multiple streams of linguistic features rather than a single stream of phones. Features may correspond to the positions of the speech articulators, such as the lips and tongue, or to more abstract linguistic categories. By allowing for asynchrony between features and per-feature substitutions, many pronunciation changes that are difficult to account for with phone-based models become quite natural. Although it is well-known that many phenomena can be attributed to this ``semi-independent evolution'' of features, previous models of pronunciation variation have typically not taken advantage of this.
In particular, we propose a class of feature-based pronunciation models implemented using dynamic Bayesian networks (DBNs). The DBN approach allows us to naturally represent the factorization of the state space of feature combinations into factors corresponding to different features, as well as providing standard algorithms for inference and parameter learning. We investigate the behavior of such a model in isolation using manually transcribed speech data. These experiments suggest that when compared to a phone-based baseline, a feature-based model has both higher coverage of observed pronunciations and better recognition performance on isolated words excised from a conversational context. We also discuss the ways in which such a model can be incorporated into various types of end-to-end speech recognizers and present several examples of implemented systems, for both acoustic speech recognition and lipreading tasks.
advisee meeting
Below is the advisee meeting schedule. Please let me know if you have any problems. -Bob
August 25 (Thu)
1. 1:30 pm: Vincent
2. 2:00 pm: Nelson
3. 2:30 pm: Jim
4. 3:00 pm: Any
5. 3:30 pm: Chihao
6. 4:00 pm: Bright
7. 4:30 pm: Eric
August 25 (Thu)
1. 1:30 pm: Vincent
2. 2:00 pm: Nelson
3. 2:30 pm: Jim
4. 3:00 pm: Any
5. 3:30 pm: Chihao
6. 4:00 pm: Bright
7. 4:30 pm: Eric
CMU Thesis Oral: Control Synthesis for Dynamic Contact Manipulation
Siddhartha Srinivasa
Robotics Institute
Carnegie Mellon University
Manipulation is the art of moving things. At the heart of the problem, an object needs to be moved from start to goal by a robot that is in contact with the object. The contacts serve two purposes: they transmit forces and impose motion constraints on the object. Even if a robot can precisely control its own motion, it is constrained by the interactions at the contacts for control of the motion of the object. Contact interactions are governed by the laws of Coulomb friction and are nonlinear and non-Newtonian.
Current solutions to the manipulation problem decompose the problem into first solving for the forces required to produce a desired object motion and then commanding the robot to apply the requisite force. This imposed decomposition assumes that the robot is capable of producing the commanded forces and velocities required for manipulation. However, this assumption is broken in dynamic manipulation, where the robot operates close to actuator saturation.
In this thesis, we explore the planning and control of dynamic manipulation subject to actuator constraints. We describe a mapping of the Coulomb friction constraints and actuator constraints into a common space, obtaining a unified contact acceleration constraint. We propose two techniques for using this constraint to generate analytical trajectories for the dynamic manipulation problem. In the first technique of time-scaling, we decouple the problem into computing a feasible path followed by selecting the speed of motion along the path that satisfies the constraint. In the second technique of task and shape decomposition, we recognize that the constraint resides in a low dimensional subspace of the system state space and project the system dynamics onto, and orthogonal to that subspace. We use a feedback controller in the constraint space and plan for the orthogonal unconstrained freedoms. Finally, we demonstrate our techniques on two dynamic manipulation tasks and a constrained, nonholonomic system.
A copy of the thesis oral document can be found at http://www.cs.cmu.edu/~siddh/dissertation/thesis.pdf.
Robotics Institute
Carnegie Mellon University
Manipulation is the art of moving things. At the heart of the problem, an object needs to be moved from start to goal by a robot that is in contact with the object. The contacts serve two purposes: they transmit forces and impose motion constraints on the object. Even if a robot can precisely control its own motion, it is constrained by the interactions at the contacts for control of the motion of the object. Contact interactions are governed by the laws of Coulomb friction and are nonlinear and non-Newtonian.
Current solutions to the manipulation problem decompose the problem into first solving for the forces required to produce a desired object motion and then commanding the robot to apply the requisite force. This imposed decomposition assumes that the robot is capable of producing the commanded forces and velocities required for manipulation. However, this assumption is broken in dynamic manipulation, where the robot operates close to actuator saturation.
In this thesis, we explore the planning and control of dynamic manipulation subject to actuator constraints. We describe a mapping of the Coulomb friction constraints and actuator constraints into a common space, obtaining a unified contact acceleration constraint. We propose two techniques for using this constraint to generate analytical trajectories for the dynamic manipulation problem. In the first technique of time-scaling, we decouple the problem into computing a feasible path followed by selecting the speed of motion along the path that satisfies the constraint. In the second technique of task and shape decomposition, we recognize that the constraint resides in a low dimensional subspace of the system state space and project the system dynamics onto, and orthogonal to that subspace. We use a feedback controller in the constraint space and plan for the orthogonal unconstrained freedoms. Finally, we demonstrate our techniques on two dynamic manipulation tasks and a constrained, nonholonomic system.
A copy of the thesis oral document can be found at http://www.cs.cmu.edu/~siddh/dissertation/thesis.pdf.
Thursday, August 18, 2005
Creating "Smart" Cars
Carnegie Mellon Builds New Technologies for the Family Car
Chriss Swaney
Will we still drive our cars, or will our cars drive us? We already have onboard navigation systems, infrared night vision, in-car satellite links, antiskid brakes and other electronic Samaritans ready to assist us when we need help behind the wheel.
Just around the corner, according to Carnegie Mellon researchers, are smart highways embedded with millions of tiny sensors and even smarter cars that are constantly aware of the traffic that is flowing around them. Drivers in the not-too-distant future will navigate from their home to the nearest freeway entrance ramp, at which time the car must take control of much of the driving task. Commuters will barrel down the highway at 120 mph with only a few inches between their car and the next. But will they be concerned?
More?
Chriss Swaney
Will we still drive our cars, or will our cars drive us? We already have onboard navigation systems, infrared night vision, in-car satellite links, antiskid brakes and other electronic Samaritans ready to assist us when we need help behind the wheel.
Just around the corner, according to Carnegie Mellon researchers, are smart highways embedded with millions of tiny sensors and even smarter cars that are constantly aware of the traffic that is flowing around them. Drivers in the not-too-distant future will navigate from their home to the nearest freeway entrance ramp, at which time the car must take control of much of the driving task. Commuters will barrel down the highway at 120 mph with only a few inches between their car and the next. But will they be concerned?
More?
i-space summer retreat
FYI. -Bob
Hi i-spacers,
This is in preparation for the i-space summer retreat on 9/15 and 9/16. The
format is based on the spring retreat.
(1) At the start of the retreat, each faculty member can give an overview of their research activities (KJ and Bob can give a longer overview)
(2) Each faculty member gets no more than 100 minutes of students' presentation time, with each talk between 15~20 minutes (leaving 5 minutes for Q&A).
(3) We will have a demo session at the end of the retreat.
Please let me know if you or your students have any suggestions.
The retreat location will be on the NTU campus (either in CSIE or BL) to save money. We will provide lunch for all participants. Please feel free to send out invitations to your friends (industrial partners, collaborators, etc.).
I would like to propose the following two deadlines.
On 9/5
- estimate # of students from your lab who will attend
- estimate # of visitors
- submit the talks & demo titles & the name of speakers
On 9/12
- submit presentation slides
Please email the above information to 婕妤 (b90002@csie.ntu.edu.tw) and cc
me (hchu@csie.ntu.edu.tw).
Thanks,
Hao-hua Chu
Department of Computer Science and Information Engineering
Graduate Institute of Networking and Multimedia
National Taiwan University
hchu@csie.ntu.edu.tw
Hi i-spacers,
This is in preparation for the i-space summer retreat on 9/15 and 9/16. The
format is based on the spring retreat.
(1) At the start of the retreat, each faculty member can give an overview of their research activities (KJ and Bob can give a longer overview)
(2) Each faculty member gets no more than 100 minutes of students' presentation time, with each talk between 15~20 minutes (leaving 5 minutes for Q&A).
(3) We will have a demo session at the end of the retreat.
Please let me know if you or your students have any suggestions.
The retreat location will be on the NTU campus (either in CSIE or BL) to save money. We will provide lunch for all participants. Please feel free to send out invitations to your friends (industrial partners, collaborators, etc.).
I would like to propose the following two deadlines.
On 9/5
- estimate # of students from your lab who will attend
- estimate # of visitors
- submit the talks & demo titles & the name of speakers
On 9/12
- submit presentation slides
Please email the above information to 婕妤 (b90002@csie.ntu.edu.tw) and cc
me (hchu@csie.ntu.edu.tw).
Thanks,
Hao-hua Chu
Department of Computer Science and Information Engineering
Graduate Institute of Networking and Multimedia
National Taiwan University
hchu@csie.ntu.edu.tw
Tuesday, August 16, 2005
機器人研發 我產業重點
2005.08.16 中國時報
機器人研發 我產業重點
李宗祐/台北報導
行政院科技顧問組昨日召開2005年產業科技策略(SRB)會議,決定將「智慧型機器人產業」列為我國新興科技產業發展重點,以商用服務、休閒娛樂、家庭服務以及老年照顧為重點產品,希望在2013年創造900億產值和2萬個工作機會。
科顧組指出,人類自1970年將產業用機器人引進市場後,過去10年伴隨著人工智慧和感測等技術陸續出現重大進展,也帶動服務用機器人世代的來臨,使科幻世界想像中的機器人世代,未來很可能快速在人類社會逐漸實現與應用。
經濟部工業局表示,服務用機器人目前正處於萌芽階段,根據各研究機構預估,2012年市場需求約在800億至 2500億美元之間,預測2003到2006年累計需求將達220萬台、3萬種應用產品出現。目前日本已將智慧型機器人列為新產業創造戰略7大領域之一,韓國也列為10大新世代成長動力產業之一,投入大量資金和人力積極發展。
工業局長陳昭義昨日在SRB會議指出,我國發展「智慧型機器人」產業規畫將以「賺錢」智慧型服務機械,快速切入全球市場為首要目標,例如強化電動代步車智慧型產品,其次是「掃地機」和「割草機」等智慧機械,再下來則是「保全機器人」等特殊用途機械人,以進入全球市場為推動目標。
政務委員兼科顧組副召集人林逢慶表示,由於我國精密機械、資訊電子、模具、光電、醫療照護及服務等產業,在世界舞台均具重要領導地位,擁有完整的技術、生產、供應體系與商品化等優勢能力,都是我國未來發展智慧型機器人產業的最大利基。
機器人研發 我產業重點
李宗祐/台北報導
行政院科技顧問組昨日召開2005年產業科技策略(SRB)會議,決定將「智慧型機器人產業」列為我國新興科技產業發展重點,以商用服務、休閒娛樂、家庭服務以及老年照顧為重點產品,希望在2013年創造900億產值和2萬個工作機會。
科顧組指出,人類自1970年將產業用機器人引進市場後,過去10年伴隨著人工智慧和感測等技術陸續出現重大進展,也帶動服務用機器人世代的來臨,使科幻世界想像中的機器人世代,未來很可能快速在人類社會逐漸實現與應用。
經濟部工業局表示,服務用機器人目前正處於萌芽階段,根據各研究機構預估,2012年市場需求約在800億至 2500億美元之間,預測2003到2006年累計需求將達220萬台、3萬種應用產品出現。目前日本已將智慧型機器人列為新產業創造戰略7大領域之一,韓國也列為10大新世代成長動力產業之一,投入大量資金和人力積極發展。
工業局長陳昭義昨日在SRB會議指出,我國發展「智慧型機器人」產業規畫將以「賺錢」智慧型服務機械,快速切入全球市場為首要目標,例如強化電動代步車智慧型產品,其次是「掃地機」和「割草機」等智慧機械,再下來則是「保全機器人」等特殊用途機械人,以進入全球市場為推動目標。
政務委員兼科顧組副召集人林逢慶表示,由於我國精密機械、資訊電子、模具、光電、醫療照護及服務等產業,在世界舞台均具重要領導地位,擁有完整的技術、生產、供應體系與商品化等優勢能力,都是我國未來發展智慧型機器人產業的最大利基。
Monday, August 15, 2005
advisee meeting
Please make a resveration before this Wednesday.
August 18 (Thu)
1. 2:00 pm: Nelson
2. 2:30 pm: Jim
3. 3:00 pm: Any
4. 3:30 pm: Chihao
5. 4:00 pm: Bright
6: 4:30 pm
August 18 (Thu)
1. 2:00 pm: Nelson
2. 2:30 pm: Jim
3. 3:00 pm: Any
4. 3:30 pm: Chihao
5. 4:00 pm: Bright
6: 4:30 pm
Sunday, August 14, 2005
國科會工程處「前瞻優質生活環境科技跨領域研究專案計畫」
the news
規劃研究項目:
一、超(人類)感知重點領域規劃計畫〔Super (Human) Senses〕
二、e化醫療保健重點領域規劃計畫 (E-Health)
三、智慧生活空間科技重點領域規劃計畫 (Smart Living Space)
四、能源與環境重點領域規劃計畫 (Energy & Environment)
規劃研究項目:
一、超(人類)感知重點領域規劃計畫〔Super (Human) Senses〕
二、e化醫療保健重點領域規劃計畫 (E-Health)
三、智慧生活空間科技重點領域規劃計畫 (Smart Living Space)
四、能源與環境重點領域規劃計畫 (Energy & Environment)
Wednesday, August 10, 2005
Atom feeds for new-post notification
Blogger can be set to publish Atom feeds (machine readable form of the blogs), which can be read in RSS/Atom aggregators, which can notify the user of new posts (so that we don't have to check the website for new posts). More information from Blogger and Wikipedia.
Site feed for this blog is already enabled, at http://nturobots.blogspot.com/atom.xml.
There are lots of aggregator apps out there, and I have tried only one. For windows users, SharpReader seems good. For linux users, I recommend Akregator.
Site feed for this blog is already enabled, at http://nturobots.blogspot.com/atom.xml.
There are lots of aggregator apps out there, and I have tried only one. For windows users, SharpReader seems good. For linux users, I recommend Akregator.
Tuesday, August 09, 2005
資訊系館天花板污損調查
To: 資訊系教授 / 實驗室助理及同學
(一)、請統計天花板『污損』及『破損』數量。
系辦將瞭解漏水原因,改善後補足或換新。
(二)、 本次天花板之統計處所:
各『教授研究室』及『實驗室』。
P.S. 公共區域已另做統計
(三)、 請各位 教授及 實驗室助理(同學)於8月12日(星期五)前電話(或回函)系辦賴先生,俾便彙整辦理。
系辦公室 賴 先生 敬啟
Tel: 33664888 # 255
Cool Program: Google Earth
A 3D interface to the planet
Google Earth – Explore, Search and Discover
Could we build a 4D interface to the planet? -Bob
Google Earth – Explore, Search and Discover
Could we build a 4D interface to the planet? -Bob
Monday, August 08, 2005
meeting
This is about the advisee meeting again. If you want to talk to me this Thursday, please make a resveration before this Wednesday. Thanks, -Bob
August 11 (Thu)
1. 2:00 pm Shao-Wen
2. 2:30 pm
3. 3:00 pm
4. 3:30 pm
5. 4:00 pm
6: 4:30 pm
August 11 (Thu)
1. 2:00 pm Shao-Wen
2. 2:30 pm
3. 3:00 pm
4. 3:30 pm
5. 4:00 pm
6: 4:30 pm
Thesis Oral: Models for Learning Spatial Interactions in Natural Images for Context-Based Classification
Sanjiv Kumar
Robotics Institute
Carnegie Mellon University
Classification of various image components (pixels, regions and objects) in meaningful categories is a challenging task due to ambiguities inherent to visual data. Natural images exhibit strong contextual dependencies in the form of spatial interactions among components. For example, neighboring pixels tend to have similar class labels, and different parts of an object are related through geometric constraints. Going beyond these, different regions e.g., sky and water, or objects e.g., monitor and keyboard appear in restricted spatial configurations. Modeling these interactions is crucial to achieve good classification accuracy.
In this thesis, we present discriminative field models that capture spatial interactions in images in a discriminative framework based on the concept of Conditional Random Fields proposed by Lafferty et al. The discriminative fields offer several advantages over the Markov Random Fields (MRFs) popularly used in computer vision. First, they allow to capture arbitrary dependencies in the observed data by relaxing the restrictive assumption of conditional independence generally made in MRFs for tractability. Second, the interaction in labels in discriminative fields is based on the observed data, instead of being fixed a priori as in MRFs. This is critical to incorporate different types of context in images within a single framework. Finally, the discriminative fields derive their classification power by exploiting probabilistic discriminative models instead of the generative models used in MRFs.
Since the graphs induced by the discriminative fields may have arbitrary topology, exact maximum likelihood parameter learning may not be feasible. We present an approach which approximates the gradients of the likelihood with simple piecewise constant functions constructed using inference techniques. To exploit different levels of contextual information in images, a two-layer hierarchical formulation is also described. It encodes both short-range interactions (e.g., pixelwise label smoothing) as well as long-range interactions (e.g., relative configurations of objects or regions) in a tractable manner. The models proposed in this thesis are general enough to be applied to several challenging computer vision tasks such as contextual object detection, semantic scene segmentation, texture recognition, and image denoising seamlessly within a single framework.
A copy of the thesis oral document can be found at http://www.cs.cmu.edu/~skumar/thesis.pdf.
Robotics Institute
Carnegie Mellon University
Classification of various image components (pixels, regions and objects) in meaningful categories is a challenging task due to ambiguities inherent to visual data. Natural images exhibit strong contextual dependencies in the form of spatial interactions among components. For example, neighboring pixels tend to have similar class labels, and different parts of an object are related through geometric constraints. Going beyond these, different regions e.g., sky and water, or objects e.g., monitor and keyboard appear in restricted spatial configurations. Modeling these interactions is crucial to achieve good classification accuracy.
In this thesis, we present discriminative field models that capture spatial interactions in images in a discriminative framework based on the concept of Conditional Random Fields proposed by Lafferty et al. The discriminative fields offer several advantages over the Markov Random Fields (MRFs) popularly used in computer vision. First, they allow to capture arbitrary dependencies in the observed data by relaxing the restrictive assumption of conditional independence generally made in MRFs for tractability. Second, the interaction in labels in discriminative fields is based on the observed data, instead of being fixed a priori as in MRFs. This is critical to incorporate different types of context in images within a single framework. Finally, the discriminative fields derive their classification power by exploiting probabilistic discriminative models instead of the generative models used in MRFs.
Since the graphs induced by the discriminative fields may have arbitrary topology, exact maximum likelihood parameter learning may not be feasible. We present an approach which approximates the gradients of the likelihood with simple piecewise constant functions constructed using inference techniques. To exploit different levels of contextual information in images, a two-layer hierarchical formulation is also described. It encodes both short-range interactions (e.g., pixelwise label smoothing) as well as long-range interactions (e.g., relative configurations of objects or regions) in a tractable manner. The models proposed in this thesis are general enough to be applied to several challenging computer vision tasks such as contextual object detection, semantic scene segmentation, texture recognition, and image denoising seamlessly within a single framework.
A copy of the thesis oral document can be found at http://www.cs.cmu.edu/~skumar/thesis.pdf.
Saturday, August 06, 2005
Invitations for The Welcome Party
You are invited to 米倉咖啡酒館 for dinner and an evening of entertainment on Sunday, August 14th beginning at 6pm. The menu will consist of 義大利麵, 三明治, 墨西哥捲餅, 甜點, 啤酒, 調酒, etc. I thought that after we ate, we could play some card games, say poker, and have further discuss about our lab space, research topics and whatever you want to say.
Place: 米倉咖啡酒館, 台北市泰順街44巷25號1樓
Time: 6pm, Sun, Aug 14

It is guaranteed to be fun of course. Please let me know as soon as possible whether or not you can attend this party and comment on this post since we have to make a reservation for the balcony seats in advance. My phone number is 0935-219529. Feel free to call if you have any questions.
-any
Place: 米倉咖啡酒館, 台北市泰順街44巷25號1樓
Time: 6pm, Sun, Aug 14
It is guaranteed to be fun of course. Please let me know as soon as possible whether or not you can attend this party and comment on this post since we have to make a reservation for the balcony seats in advance. My phone number is 0935-219529. Feel free to call if you have any questions.
-any
CNN: Scanning tech reveals mummy mysteries
Friday, August 5, 2005; Posted: 10:29 a.m. EDT (14:29 GMT)
SAN FRANCISCO, California (AP) -- Researchers have uncovered the mysteries surrounding a 2,000-year-old mummy without peeling back layers of bandages or even opening the gold-plated coffin.
Using a state-of-the-art CT scanner that rotated all the way around the tiny mummified girl, San Jose-based Silicon Graphics Inc. took 60,000 images and created 3-D models that allowed scientists to look at her resin-filled body cavities, her facial features, even her baby teeth. (More...)
SAN FRANCISCO, California (AP) -- Researchers have uncovered the mysteries surrounding a 2,000-year-old mummy without peeling back layers of bandages or even opening the gold-plated coffin.
Using a state-of-the-art CT scanner that rotated all the way around the tiny mummified girl, San Jose-based Silicon Graphics Inc. took 60,000 images and created 3-D models that allowed scientists to look at her resin-filled body cavities, her facial features, even her baby teeth. (More...)
Friday, August 05, 2005
Thesis Defense: Learning Static Object Segmentation from Motion Segmentation
Michael G. Ross , MIT CSAIL
Date: Wednesday, August 10 2005
Dividing an image into its constituent objects can be a useful first step in many visual processing tasks, such as object classification or determining the arrangement of obstacles in an environment. Motion segmentation is a rich source of training data for learning to segment objects by their static image properties. Background subtraction can distinguish between moving objects and their surroundings, and the techniques of statistical machine learning can capture information about objects' shape, size, color, brightness, and texture properties. Presented with a new, static image, the trained model can infer the proper segmentation of the objects present in a scene. The algorithm presented in this work uses the techniques of Markov random field modeling and belief propagation inference, outperforms a standard segmentation algorithm on an object segmentation task, and outperforms a learned boundary detector at determining object boundaries on the test data.
Date: Wednesday, August 10 2005
Dividing an image into its constituent objects can be a useful first step in many visual processing tasks, such as object classification or determining the arrangement of obstacles in an environment. Motion segmentation is a rich source of training data for learning to segment objects by their static image properties. Background subtraction can distinguish between moving objects and their surroundings, and the techniques of statistical machine learning can capture information about objects' shape, size, color, brightness, and texture properties. Presented with a new, static image, the trained model can infer the proper segmentation of the objects present in a scene. The algorithm presented in this work uses the techniques of Markov random field modeling and belief propagation inference, outperforms a standard segmentation algorithm on an object segmentation task, and outperforms a learned boundary detector at determining object boundaries on the test data.
Thursday, August 04, 2005
Call For Paper (CFP)
*Call for Papers:Joint Issue of IJCV and IJRR on Vision and Robotics*
Over the past several years, there has been rapid progress in the development of vision techniques applicable to robotics. At the same time vision has become a more practical and affordable technology for robotics applications. However, the scientific interests of both communities have diverged to the point that few major journals or conferences publish new and innovative results at the confluence of vision and robotics.
The goal of this joint issue of IJCV and IJRR is to provide a forum for the communication of new ideas at the interface between the vision and robotics communities. Topics of interest include (but are not limited to):
- Vision and control
- Vision and manipulation
- Vision and mobility
- Vision and navigation
- Vision combined with other sensors such as range, force or tactile
- Unique visual sensors suited to robotic applications
- Robotic systems incorporating vision sensors in novel ways
- Applications of vision and robotics
The joint issue will appear simultaneously in both journals, and will include an editors' forward that outlines the content of both journals. The preliminary deadline for paper submission is *October 1, 2005*. Instructions and updated information on submission can be found at: http://www.vision-based-control.org/JointIssue
Guest Editors:
Gregory D. Hager, Johns Hopkins University
Seth Hutchinson, University of Illinois Urbana-Champaign
Martial Hebert, Carnegie Mellon
Over the past several years, there has been rapid progress in the development of vision techniques applicable to robotics. At the same time vision has become a more practical and affordable technology for robotics applications. However, the scientific interests of both communities have diverged to the point that few major journals or conferences publish new and innovative results at the confluence of vision and robotics.
The goal of this joint issue of IJCV and IJRR is to provide a forum for the communication of new ideas at the interface between the vision and robotics communities. Topics of interest include (but are not limited to):
- Vision and control
- Vision and manipulation
- Vision and mobility
- Vision and navigation
- Vision combined with other sensors such as range, force or tactile
- Unique visual sensors suited to robotic applications
- Robotic systems incorporating vision sensors in novel ways
- Applications of vision and robotics
The joint issue will appear simultaneously in both journals, and will include an editors' forward that outlines the content of both journals. The preliminary deadline for paper submission is *October 1, 2005*. Instructions and updated information on submission can be found at: http://www.vision-based-control.org/JointIssue
Guest Editors:
Gregory D. Hager, Johns Hopkins University
Seth Hutchinson, University of Illinois Urbana-Champaign
Martial Hebert, Carnegie Mellon
Lab Space
The department agreed to fix the holes on the floor and repaint the lab. Please let me know if you find any other problems. -Bob
Wednesday, August 03, 2005
Thesis Oral: Game Theoretic Control for Robot Teams
Rosemary Emery-Montemerlo
Robotics Institute, Carnegie Mellon University
Abstract
Planning for a decentralized team of robots is a fundamentally different problem from that of centralized control. During decision making, robots must take into account not only their own observations of world state, but also the possible observations and actions of teammates. While the interconnectedness of such a reasoning process seems to require an infinite recursion of beliefs to be modelled by each member of the team, game theory provides an alternative approach. Partially observable stochastic games (POSGs) generalize notions of single-stage games and Markov decision processes to both multiple agents and partially observable worlds. Even if there is only limited communication between teammates, POSGs allow robots to come up with policies that still take into account possible teammate experiences without the need to explicitly model any recursive beliefs about those experiences.
While a powerful model of decentralized teams, POSGs are computationally intractable for all but the smallest problems. This dissertation proposes a Bayesian game approximation to POSGs in which game theoretic reasoning about action selection is retained, but robots reason only a limited time ahead about uncertainty in world state and the experiences of their teammates. Planning and execution are interleaved to further reduce computational burdens: at each time step robots perform a step of full game theoretic reasoning about their current action selection given any possible history of observations and a heuristic evaluation of the expected future value of those decisions.
The Bayesian game approximation algorithm (BaGA) is able to find solutions to much larger problems than previously solved. Further computational savings are gained by reasoning about groups of similar observation histories rather than single histories. Finally, efficiency and performance are also improved through the use of run-time communication policies that trade-off expected gains in performance with the costs of using bandwidth. In this dissertation, the performance of BaGA is compared to policies generated for full POSGs as well as heuristics. BaGA is also used to develop real-time robot controllers for a series of simulated and physical robotic tag problems that gradually increase in realism.
A copy of the thesis oral document can be found at http://www.cs.cmu.edu/~remery/thesis/remery-thesis.pdf.
Robotics Institute, Carnegie Mellon University
Abstract
Planning for a decentralized team of robots is a fundamentally different problem from that of centralized control. During decision making, robots must take into account not only their own observations of world state, but also the possible observations and actions of teammates. While the interconnectedness of such a reasoning process seems to require an infinite recursion of beliefs to be modelled by each member of the team, game theory provides an alternative approach. Partially observable stochastic games (POSGs) generalize notions of single-stage games and Markov decision processes to both multiple agents and partially observable worlds. Even if there is only limited communication between teammates, POSGs allow robots to come up with policies that still take into account possible teammate experiences without the need to explicitly model any recursive beliefs about those experiences.
While a powerful model of decentralized teams, POSGs are computationally intractable for all but the smallest problems. This dissertation proposes a Bayesian game approximation to POSGs in which game theoretic reasoning about action selection is retained, but robots reason only a limited time ahead about uncertainty in world state and the experiences of their teammates. Planning and execution are interleaved to further reduce computational burdens: at each time step robots perform a step of full game theoretic reasoning about their current action selection given any possible history of observations and a heuristic evaluation of the expected future value of those decisions.
The Bayesian game approximation algorithm (BaGA) is able to find solutions to much larger problems than previously solved. Further computational savings are gained by reasoning about groups of similar observation histories rather than single histories. Finally, efficiency and performance are also improved through the use of run-time communication policies that trade-off expected gains in performance with the costs of using bandwidth. In this dissertation, the performance of BaGA is compared to policies generated for full POSGs as well as heuristics. BaGA is also used to develop real-time robot controllers for a series of simulated and physical robotic tag problems that gradually increase in realism.
A copy of the thesis oral document can be found at http://www.cs.cmu.edu/~remery/thesis/remery-thesis.pdf.
Tuesday, August 02, 2005
Our Lab Space (Room 407)
 This image is about our lab space. We can choose what kind of furniture we need. Does anyone have good ideas? We can discuss all the details on welcome party next week.
This image is about our lab space. We can choose what kind of furniture we need. Does anyone have good ideas? We can discuss all the details on welcome party next week.
About Welcome Party
For some reason, the welcome party will be moved to next week, say from 6pm onwards. Please leave your available dates below.
Your attendance will be greatly appreciated!
Your attendance will be greatly appreciated!
Individual meeting
Hi Folks,
Before the semester begins, I can hold individual meetings every Thursdays. If you want to talk to me, you can pick a slot and comment on this post.
-Bob
August 4 (Thu)
1. 2:00 pm
2. 2:30 pm
3. 3:00 pm
4. 3:30 pm
5. 4:00 pm
6: 4:30 pm
Before the semester begins, I can hold individual meetings every Thursdays. If you want to talk to me, you can pick a slot and comment on this post.
-Bob
August 4 (Thu)
1. 2:00 pm
2. 2:30 pm
3. 3:00 pm
4. 3:30 pm
5. 4:00 pm
6: 4:30 pm
Monday, August 01, 2005
Taking a Look at Our Lab Space
Since we have to discuss something about our lab space at the welcome party, such as how to arrange it, when to clean it, etc., Bob and I plan to arrange a meeting at NTU in the coming 2 days such that we can talk with Bob and take a look at our lab space.
Please let me know if you can attend this meeting or just leave your available time slot below if you can!
My mobile-phone number: 0935-219529
Please let me know if you can attend this meeting or just leave your available time slot below if you can!
My mobile-phone number: 0935-219529
Subscribe to:
Posts (Atom)